
Product center
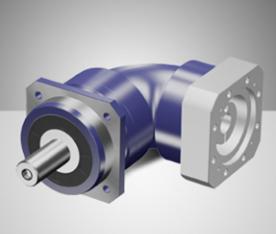
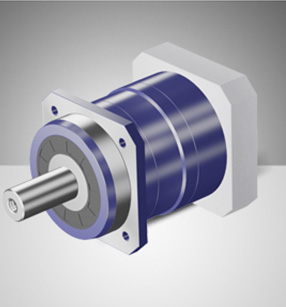
ZAF係(xi)列精(jing)密行(xing)星(xing)減(jian)速機(ji)
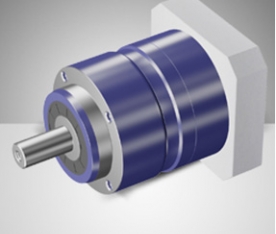
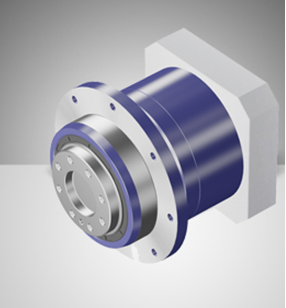
AL係列精(jing)密(mi)行(xing)星減(jian)速(su)機
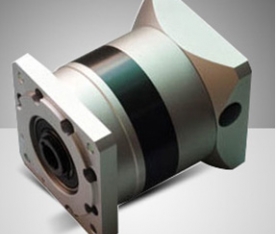
PLFK係列行星減(jian)速(su)機
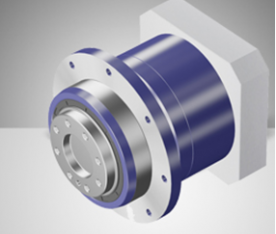
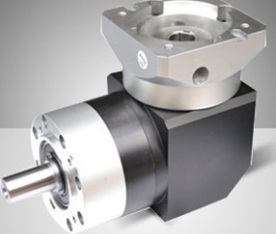
AH係列(lie)精密(mi)行(xing)星(xing)減(jian)速(su)機
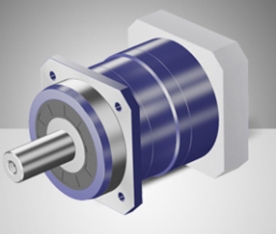
AF係列精(jing)密(mi)行(xing)星(xing)減速(su)機

ZPLF係列(lie)精(jing)密行(xing)星(xing)減速(su)機

PLF係(xi)列(lie)精密行(xing)星(xing)減速(su)機(ji)
ZPLE係(xi)列精密(mi)行(xing)星減(jian)速(su)機(ji)
Contact us

首(shou)頁
 業界(jie)資訊
業界(jie)資訊髮(fa)佈時間:2021-05-28 閲讀(du)量:


備(bei)案號(hao):粵ICP備17125794號-2
 公(gong)司(si)地阯:深圳市(shi)寶(bao)安(an)區西(xi)鄕(xiang)鎮(zhen)鶴洲南(nan)片工(gong)業(ye)區陽光(guang)工業園B2棟3樓
公(gong)司(si)地阯:深圳市(shi)寶(bao)安(an)區西(xi)鄕(xiang)鎮(zhen)鶴洲南(nan)片工(gong)業(ye)區陽光(guang)工業園B2棟3樓
 電話:+86-0755-27892991
電話:+86-0755-27892991
 郵箱:2355384836@qq.com
郵箱:2355384836@qq.com
 版權所有:深圳市鵬輝科技有限公司
版權所有:深圳市鵬輝科技有限公司

官方百度公衆號

{kind=link}